
K-디지털 로보틱스 메타팩토리 부트캠프(카티아,디지털트윈)
- 교육기간
- 정규 6개월
-
교육비
2026 정책 변경으로
자부담 10% 도입,
훈련장려금으로 실부담 O원 -
K-디지털 40만원
10,305,360원
(90% ~ 최대100% 지원 )
- 지금 합류하면 혜택 ALL 제공
-
- 500만원 상당 AI+실무 활용 인강
- 50+ 협력기업 취업연계 (면접 멘토링)
- 매달 20만원 훈련장려금
- 온라인 학습 시스템 제공 · 교재 지원
- 1차 개강03월 31일(화)
- 2차 개강04월 03일(금)
WHY?
로보틱스 메타팩토리 부트캠프로
시작해야 할까요?
카티아 프로그램을 통한 로보틱스 설계 역량 강화+PLC 프로그래밍 제어+
유니티를 활용한 스마트팩토리 디지털 트윈 구현까지
설계 능력과 자동화 설비 가상화 구현 능력을 모두 갖춘
채용시장에서 매력을 마음껏 어필할 수 있는 융합형 인재로 성장합니다.
Start now
왜, 메타 팩토리인가요?
META(verse) (가상의)
+Factory (공장)
“스마트팩토리의 가장 최신 형태”
- 인공지능, 빅데이터,
로봇, IOT기술을 융합한
공장 자동화
스마트팩토리 - 현실의 데이터를 실시간으로
수집 후 가상 화면에
반영,하여
동일하게 구현하는 기술
디지털 트윈
(Digital Twin) - 공장의 모든 설비와 공정을
가상으로
복제해 운영하는
디지털 환경
메타팩토리
현대자동차그룹에서 처음 제시한 용어로,
생산시설의 모든 설비와 공정을 가상으로 복제하여,
IoT 센서로 수집한 실시간 데이터를 디지털 트윈과
인공지능을 통해 분석하여 생산성을 높이고,
문제를 예측해 사전 대처할 수 있습니다.
이를 통해 효율성, 품질, 유연성을 극대화하고
비용을
절감하며 지속 가능성을 강화하는 제조 혁신 방식입니다.
4차 산업 시대의 로보틱스와
디지털 기술의 융합
4차 산업 시대 제조업, 물류, 에너지, 건설 등
다양한 분야에서
효율성, 생산성 향상, 비용 절감을 위해
이미 로보틱스와 디지털 기술을 융합하여
적용하고 있습니다.
-
현대 자동차 생산 라인 디지털 트윈, 로봇 자동화 조립
성과 : 공정 전환 비용 절감,
생산성 향상, 품질 관리 강화 -
삼성전자 반도체 공정 디지털 트윈,로봇 기반 자동화
성과 : 생산성 향상,
불량률 감소, 공정 유연성 강화 -
CJ 대한통운 물류센터 디지털 트윈, 로봇 기반 물류 자동화
성과 : 물류 처리 속도 개선,
재고 관리 최적화, 물류비용 절감 -
포스코(POSCO) 제철소 디지털 트윈,
자동화 생산 로봇성과 : 실시간 설비 모니터링,
가동 중단 시간 최소화,
생산 효율성 향상 -
두산중공업 발전 설비 디지털 트윈,
자동 점검 로봇성과 : 설비 가동률 향상,
유지보수 효율 개선,
운영 비용 절감 -
한화시스템 무기 시스템 디지털 트윈,
자동화 생산 로봇성과 : 성능 검증 시간 단축,
개발 비용 절감,
생산 효율성 강화 -
SK하이닉스 반도체 제조 공정 디지털 트윈,
자동화 생산 시스템성과 : 공정 최적화,
생산성 및 품질 향상,
비용 절감
그래서 기업은 현재,
단순 기술 인력이 아닌 기술 융합형
직무를
수행할 수 있는 인재를
찾고 있습니다.
- 단순 기술 직무
- 로봇 조작 및 기본 제어
- 기초 3D 모델링
- 단순 공정 자동화
(PLC 프로그래밍) - 장비 조작 및 유지 보수
- 기초 데이터 수집 및 정리
- 기본 HMI 인터페이스 조작
- 정형화된 문제 해결
- 기본적인 생산성 관리
- 개별 작업 수행, 공정 모니터링
- 정형화된 데이터 입력 및 처리
- 기본적인 공정 모니터링
- 기본적인 시각적 피드백 처리
- 기술 융합형 직무
- 로봇 설계와 디지털 트윈 통합 운영
- 복합 공정 자동화 및 최적화
- 디지털 트윈 기반 공정 시뮬레이션
- 실시간 데이터 모니터링 및 분석
- 예측 유지 보수 및 문제 예방
- HMI 개발 및 사용자 경험(UX) 설계
- VR/AR을 활용한 공정 최적화 시뮬레이션
- 스마트 팩토리 운영 및 관리
- 다양한 공정 간 통합 관리 및 최적화
- 팀 협업과 프로젝트 관리 역량
- 센서 및 CPS 기반 피드백 제어
- 데이터 기반 의사결정 및 개선 전략 수립
- 실시간 공정 모니터링 및 성능 최적화
- XR(확장 현실) 기반 인터랙티브 콘텐츠 개발
단순 직무 수행 인력 기술 융합 직무 수행 인력 의 비교
- 초기연봉
- 단순 직무 수행 인력 평균 연봉:
3,000만 원 ~
4,000만 원 - 기술 융합 직무 수행 인력 평균 연봉: 4,500만 원 ~
6,000만 원
- 주요직무
- 단순 직무 수행 인력 단순 부품 모델링,
기본 장비 조작,
단순 프로그래밍 수행 - 기술 융합 직무 수행 인력 로봇 설계, 디지털 트윈,
데이터 분석,
자동화 프로그래밍
- 역할
- 단순 직무 수행 인력 업무 범위 내
특정 작업 단순 수행 - 기술 융합 직무 수행 인력 프로젝트의 기획,
설계, 테스트,
최적화까지 전반적 관리
- 기술 적용
범위 - 단순 직무 수행 인력 개별 기술에 집중
- 기술 융합 직무 수행 인력 로봇 설계, 디지털 트윈,
자동화 기술을
통합적으로 적용
- 기업 내
가치 - 단순 직무 수행 인력 제한된 역할로
단일 작업에만 기여 - 기술 융합 직무 수행 인력 비용 절감, 생산성 향상,
문제 해결을 통한
고부가가치 창출
- 취업
경쟁력 - 단순 직무 수행 인력 특정 기술에 한정되어
적용 범위가 좁음 - 기술 융합 직무 수행 인력 복합적 기술 역량으로
다양한 산업에서
높은 수요와 경쟁력
- 연봉 차이
- 단순 직무 수행 인력 초봉 차이 :
약 1,000만 원 ~
2,000만 원 - 기술 융합 직무 수행 인력 경력 차이: 약 3,000만 원 이상
Why? 왜, 이젠에서
메타팩토리 부트캠프를
참여해야 하나요?
신규채용 결정요소 1위(96.2%) ‘직무능력’,
* 출처: 고용노동부 기업채용동향조사
메타팩토리 부트캠프 참여 시
6가지 핵심 직무능력을 얻을 수 있습니다.
-

기본 프로그래밍 역량 CATIA, PLC, Unity 프로그램으로
실제 산업 현장에서
필요한 모델링, 제어,
시뮬레이션 기술을 직접 경험하고
익혀
실무에 바로 투입될 수 있는 역량을 갖춥니다. -


로보틱스, 자동화 공정 (첨단 로봇 시스템 설계 경험)
로봇 설계 및 운영에 대한
심도 있는
경험을 쌓을 수 있습니다. -


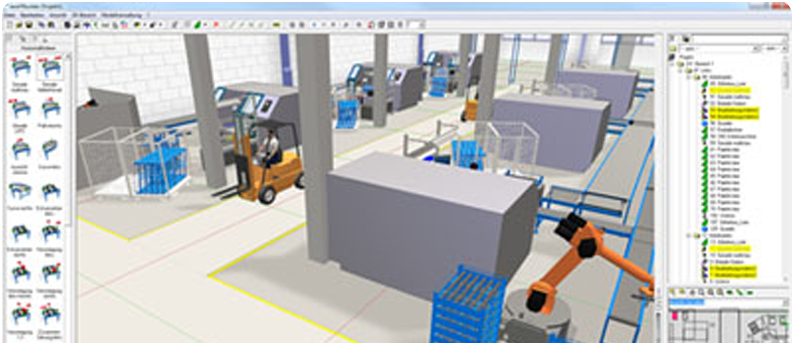
스마트팩토리 구축 (디지털 트윈과 가상현실 활용 능력)
디지털트윈과 버추얼 트윈 제작
실습으로 최신 제조업 기술 이해와
활용 능력을 키웁니다. -


기계설계 및 구조해석 (문제 해결 및 역설계 능력 향상)
실제 장비를 사용한
역설계 프로젝트를 통해
기계의 구조·동작 원리를
깊이 이해해
문제를 분석·해결할 수 있는 능력을 갖춥니다. -
자동화제어 직무 (고급 PLC 프로그래밍 스킬)
Mitsubishi PLC 및 관련
소프트웨어를 사용해
제어 시스템을 직접 프로그래밍 및
운영
실습으로 고급 PLC 프로그래밍 능력을 갖춥니다. -


데이터 기반 의사결정 능력 (실시간 데이터 분석 및 시스템 연동)
실시간 데이터 수집 및
PLC와의 연동 경험을 통해
데이터 분석 및
시스템 통합 능력을 키웁니다. -

디지털트윈 산업 특강, 선배와의 만남,
취업 특강 등 세미나 개최 취업 성공을 위한 디지털 트윈 산업 특강, 선배와의 만남, 취업 관련 세미나 등 다양한 프로그램을 개최합니다.
취업 세미나 및 특강, 취업에 성공한 선배들의 멘토링,
이력서 및 자기소개서 작성 가이드,
동행 면접 지원 등 취업 지원 시스템을 제공합니다.
취업 경쟁력 강화 + 취업 인프라 확대 = 취업 성공!
EZEN 로보틱스 메타팩토리 부트캠프
어떻게 배우나요?
-
- 사전 수업 스타트 캠프개념 형성 학습
- 기초설계, 로보틱스 개론
기초 선행 학습
-
- 정규 부트 캠프 적용/발전 (로보틱스 장비 활용)
- 로보틱스, 디지털트윈 실전
+ 360시간 프로젝트
-
- 스터디 크루 튜터/멘토 피드백
- 커뮤니티 안에서 가파른 성장
-
- 취업 성공 캠프 취업 성공
- 협력 기업 매칭
스터디크루(현직 엔지니어 튜터링/멘토링 + 스터디 그룹)
사전 수업 스타트캠프
비전공 기초자라 수업 참여가 망설여진다면?
로보틱스 메타팩토리의 시작,
사전 수업 스타트 캠프로 해결!
기계에 대한 기초 지식이 없는 학생들을 위해 사전 교육을 제공하여
로보틱스의 기본 개념과 설계 기초능력을 쌓고,
이를 바탕으로
정규 수업 부트캠프를 완벽 적응할 수 있도록 지원합니다.
카티아 설계 이해 속도
- PreClass
1차- 1차 (온·오프라인)
-
- IT 용어집 제공
- 로보틱스 이론 수업
- AutoCAD 기초 수업(2주)
- KDC 챗GPT 업무 자동화 (1~4주)
- PreClass
2차- 2차 (오프라인)
-
- AutoCAD 기계도면 실습
- 프로그래밍 기초 개념
- Regular
Class- 3차 (오프라인)
-
- 동기부여 2주 집중 보충수업
- 학습 스터디 크루
- 수준별 튜터링
정규 수업 부트캠프
실무에 적응할 정도로 설계할 수 있을지 걱정이라면?
체계적인 정규 수업 부트캠프로
융합형 기술 직무 능력 업그레이드!
-
제대로 만든
Curriculum을 배웁니다. -
총 2번의 팀 프로젝트로
문제해결능력 향상!협동 로봇 설계
메타팩토리 버추얼 트윈 프로젝트 -
혼자는 어렵지만, 함께하면
빨라지고 쉬워집니다. -
- 카티아를 통한 로봇의 정교한 설계 능력과 구조 해석 능력
- PLC 프로그래밍을 통한 로봇의 제어 및 디지털 트윈 연동 능력
- 디지털 트윈으로 구현한 메타팩토리
융합형 기술을 가진 인재로
성장할 수 있습니다.
로보틱스 메타팩토리 부트캠프
교육 로드맵
- 기초
이론학습로보틱스 기초 설계 이해 - 실전학습(설계 및 3D모델링)CATIA V5 / UNITY / 디지털 트윈을
통한 설계 및 3D 모델링 - 프로젝트380시간
-
MF-CPS 교육 단계
메타팩토리를 위한 DT 데이터 생성-
-
 스마트팩토리 모델 생성
스마트팩토리 모델 생성 - AutoCAD(2D)
- CATIA V5(3D)
-
생성형 AI
모델검증- 산업 응용 모델 설계 및 분석
- 분류에 따른 지표 추출
- 회귀를 위한 지표 학습
-
Programmable Logic
PLC(ROS)
Controller- 로직 구성
- 시퀀스 제어 및 오류 처리
- 데이터 관리 및 처리
- 센서, 액추에이터와 PLC의 인터페이싱
- 사람-기계 인터페이스(HMI) 개발 및 통합
- 로봇 팩토링과 CPS
산업용로봇 모델 및 메타 팩토리 환경 구성
- 협동형 산업 로봇, 자율이동 로봇
- 직교 로봇, 픽앤플레이스 로봇, 자율이동 로봇
- 로보틱스 개론 및 로봇 구성 요소 및 분류
- 메타팩토리에서의 로봇 응용
- 로봇 운동학 및 역학 이론
- 로봇 제어 시스템의 기본 원리
- 로봇 센서 및 스마트 액추에이터 기술
- 로봇 시스템 통합
및 응용


-
로보틱스 물리엔진
- Physics Articulations 소개
- 로봇의 관절 설정 대 일반 관절
- 로봇 관절 구축 방법
- 관절 조인트 유형 및 자유도
- 강체 물리학 이론
- 로봇 몸체 조인트 앵커 특성 및 속성
- 물리적 특성을 고려한 로봇 속성
- 가상 물리 시스템의 주요 기술 및 구현


-
-
가상화 동기화
CPS 프로젝트프로젝트 구현
- 메타팩토리 모델 생성
- 모델 검증
- PLC(ROS)
- 로봇 팩토링과 CPS
- 융합 프로젝트 연계
사전 검증 프로젝트
-
-
MF-Realtime Digital Twin 교육 단계
- Universal
Data Transfer- 2D-DWG
- 3D-OBJ/FBX
- STEP/STL
- 실시간 시각화 Unity 프로그래밍
시각화를 위한 Unity
- Project Setup &
Settings - Unity Editor Essentials
- 실시간 산업 필수 요소
- 장면구성 필수사항
- Unity Physics 구현 요소
- Render Pipeline 구성
- Publishing
(Win,WebGL,Mobile)
- Project Setup &
- Simulation for Realtime
Digital TwinUnity를 이용한 DT 구현
- URDF 임포트 및 장면 설정
- 메시, 운동학 및 동적 속성 정의
- 사용자 인터페이스 설정
- 데이터 수집 및 모델학습
- DT 실시간 데이터 시각화
- PLC 제어시스템과 DT 연동
- 디지털 트윈과 PLC 통신 설정
- PLC 데이터수집과 DataBase 구축
- 동적 DT 데이터 시각화
- DT기반 PHM 시각화
- 가상화, 유연화, 지능화, 동기화 구축
- Simulation 구현
시스템 하이엔드 시뮬레이션
- Ergonomic & Optimization
- Event & Interactions
- 시스템 간섭 체크
- 통계 및 분석 자료 문서화
- 생산 프로세스, 자재 조달 실시간 식별
- 매개변수 실시간 수정하여 영향 변수
변경을 통해 최적의 시스템
컨스텔레이션 제공 - Real 시스템이 구축 전에
프로세스가 최적화
-
- Universal
-
MF-Digital Twin 융합 프로젝트
-

- Universal
Data Transfer 실시간 시각화 - Simulation for Realtime Digital Twin
- Windows
Platform WebGL
Platform Mobile
Platform - Build & Publishing
- Cross Platform 구현


- Universal
-
-
STEP 01. 로보틱스 모델링(CATIA)
-
카티아 모델링 기초 및 응용
- 카티아 기본 툴 학습
- Solid modeling -
직교좌표 로봇, 공압 시스템 부품 - Surface modeling -
컨베이어 시스템 및 협동 로봇 부품 모델링 - Assembly design - 컨베이어 시스템,
직교좌표 로봇, 공압 시스템 및 협동 로봇 조립
-
로보틱스 모델링
- 로보틱스 개론, 구성요소, 분류
- 스마트팩토리에서의 로봇 응용
- 로봇 운동학 및 역학 이론
- 로봇 제어 시스템의 기본 원리, 센서 및 액추에이터
- 로봇 시스템 통합 및 응용
- 산업용 로보틱스 모델링
(6축 로봇, 이송직교 로봇, 컨베이어시스템) - 기구 학적 기능 구조 반영, 어셈블리
- 모델링 자료 활용, 세부구조도 및 조립도 완성
-
로보틱스 자동화 설비 구조해석
- 스마트 설비 제어 방식 관련 자료수집 및
스마트 설비 사양 결정 - 공정 LAY-OUT 및
PFD(Process Flow Diagram)
공정흐름도 작성 - 자동화 설비의 구조적 이해와 개념 설계
- 자동화 설비 LAY-OUT 및
PFD(Process Flow Diagram)
공정흐름도 작성
- 스마트 설비 제어 방식 관련 자료수집 및
-
-
STEP 02. 로보틱스 설계 프로젝트
PROJECT-
협동 로봇 시스템 설계 프로젝트
5명의 프로젝트 팀을 구성 참여기업과 협업하여 진행- 팀 주제 1 컨베이어시스템 설계
- 팀 주제 2 직교좌표 로봇 설계
- 팀 주제 3 협동 로봇 설계
- 팀 주제 4 자유 이송로봇 설계

-
STEP 03. 로보틱스 제어 (PLC 프로그래밍)
-
PLC 프로그래밍 기초
- PLC 프로그래밍 언어 개요
- 프로그래밍 툴 및 소프트웨어 환경
- 기본 프로그래밍 명령어 및 로직 구성
- 시퀀스 제어 및 오류 처리 기법
- 데이터 관리 및 처리
- 센서, 액추에이터와 PLC의 인터페이싱
- 사람-기계 인터페이스(HMI) 개발 및 통합
-
PLC 프로그래밍 응용
- 로보틱스 제어를 위한 PLC 응용
- MITSUBISHI PLC GX Work2
프로그램 활용 - MITSUBISHI PLC GX Developer
프로그램 활용 - 스마트팩토리의 자동화 프로세스 설계
- IoT 및 클라우드 기술과의 통합
- PLC 시스템의 진단 및 유지 보수
-
-
STEP 04. 버추얼 트윈 실전(Unity, VR)
-
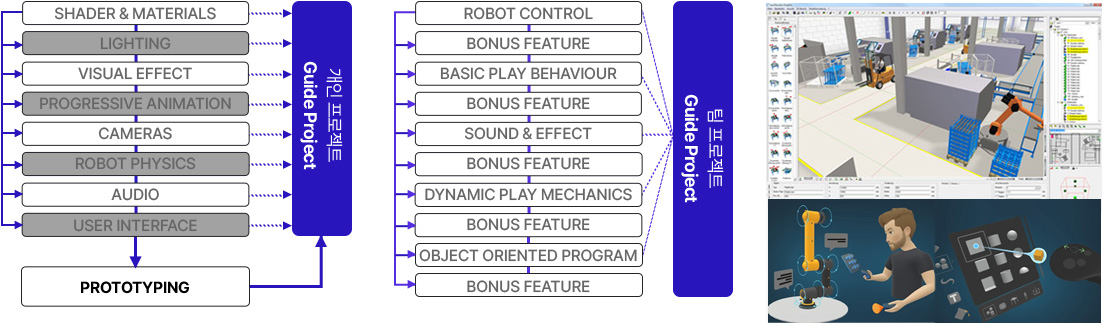
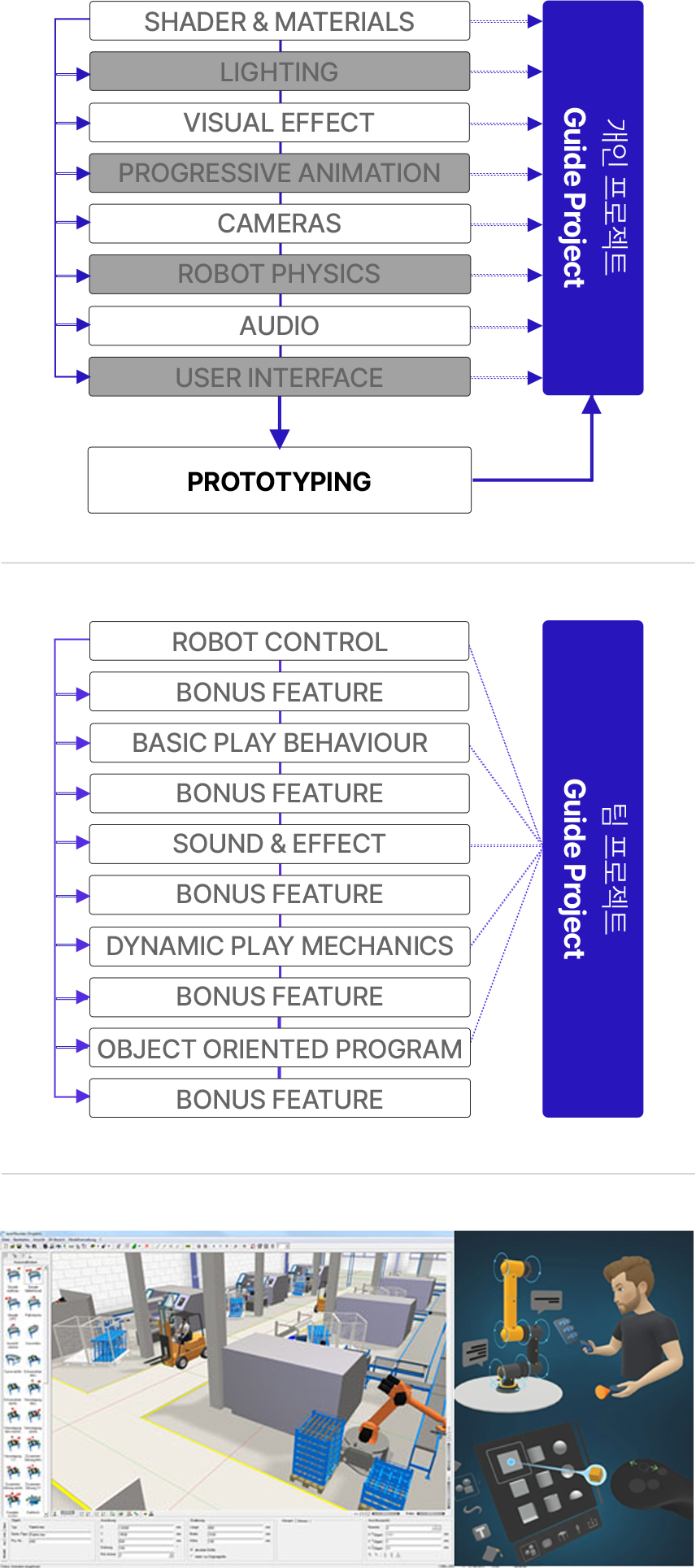
버추얼 트윈 기초
- Unity 개요
- Unity Shader & Materials
- Unity Lighting, Visual effect,
Progressive Animation,
Camera Control - Unity Robot Physics- 충돌 및
Collision Detection - Unity UGUI 및 Prototyping 설정
- Physics Articulations 개요
- 로봇의 관절 설정 및 구축 방법
- Unity에서 관절 구축 방법
- 관절 조인트 유형 및 자유도
- 로봇 몸체 조인트 앵커 특성 및 속성
- 물리적 특성을 고려한 로봇 속성
-
실시간 데이터 시각화 로보틱스와
CPS 연동(Unity C#, PLC)- Unity C# 프로그래밍 및 PLC DataBase 구축
- Universal Data Transfer
- PLC 제어시스템과 가상화 모델 연동 기술 소개
- 버추얼 트윈과 PLC 통신 설정
- PLC 실시간 데이터수집과 버추얼 트윈 연결
- 버추얼 트윈 실시간 데이터 시각화
- 버추얼 트윈 실시간 데이터베이스 연동 및
양방향 제어(DT & PLC Signal) - 협동 로봇 구성 및 좌표계, 로봇 활성화 및 GUI 설명
- 조그, 직접 교시를 이용한 위치 이동
- 버추얼 I/O, 툴체인지 및 소재 PICK & PLACE
- MOVE 명령어, 도형 그리기
- 프로그램 흐름 만들기 1(대기, 반복, 조건문 등),
2(쓰레드, 종료 후, 시작 전등) - 변수 선언 방법 및 로봇 상대 움직임
- 변수를 이용하여 로봇 반복 동작 실습
- 충돌감지 사용 유무 설정, 상/하부 소재 이송 및
볼트 조립 - 로봇 정지 및 대기 타임아웃 사용하기
- 로봇 안전 위치 복귀 프로그래밍
- PLC 적용 버추얼 입출력 특수 기능 및 set 기능
- 패턴 기능 사용하기
- 변수화를 이용한 팔레타이징
- PLC 적용 소재 공급하여 컨베이어를 통해
끝단으로 이동 실습
-
버추얼트윈 익스피리언스
- 실시간 모니터링 및 데이터 로깅
- 자동 운전, 제품 생산, 제어 인터페이스 등을 포함한
실전 시뮬레이션 구현 - Ergonomic & Optimization
- Event & Interactions
- 시스템 간섭 체크
- 통계 및 분석 자료 문서화
- 생산 프로세스, 자재 조달 실시간 식별
- 매개변수 실시간 수정하여 영향 변수
변경을 통해 최적의 시스템 컨스텔레이션 제공 - Real 시스템이 구축 전에 프로세스가 최적화
-
-
STEP 05. 파이널 프로젝트
PROJECT-
로보틱스 메타팩토리 버추얼 트윈 프로젝트
5명의 프로젝트 팀을 구성 참여기업과 협업하여 진행- 공통 주제 Virtual Factory Environment 구축
- 팀 주제 1 물류 이송로봇 시스템 구축
- 팀 주제 2 컨베이어 자동화 로봇 시스템 구축
- 팀 주제 3 자유 이동로봇 시스템 구축


-
스터디 크루
열정 200% 수강생들의 모임
함께 성장하여 즐거운 스터디 크루와
전문 튜터의 든든한 지원!
여러분의 성장을 돕기 위해 스터디 크루를 운영합니다.
동료들과 함께 학습하고,
서로의 지식을 공유하여 끊임없는 동기부여를 받습니다.
-
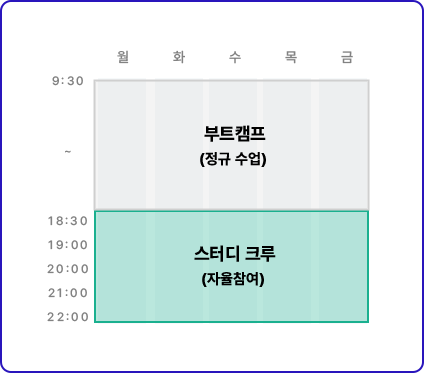
스터디 크루(커뮤니티) 운영
-
현직 카티아 엔지니어 튜터(마스터)링
스터디 크루와 전문 튜터의 가이드로
가파른 성장을 이룰 수 있습니다.
빠르게 변하는 로보틱스,
스마트팩토리
트렌드에 맞춘
취업 성공 캠프로,
취업성공률이 달라집니다.
-

취업 성공률 현황
-
이젠아카데미 평균 카티아 취업률 78.3%
- 로봇, 스마트팩토리 분야 이력서의 핵심은 직무능력
어필과 프로젝트! -
- 이력서에서 직무 관련 역량, 프로젝트 경험을 효과적으로 어필하는 방법
- 면접 시 기술적인 질문 대비, 기업 맞춤형 답변 준비하는 방법
- 강점을 효과적으로 어필하고, 약점을 보완하는 방법까지 구체적으로 1:1 컨설팅
- 로봇 설계, 스마트팩토리 구인공고 공유 및 인재 추천
-
- 이젠아카데미 협약기업(프로젝트 같이 진행한 기업 포함) 및 기업 구인 내용을 확인하여
개인별 맞는 기업을 매칭하여 취업 합격률 UP
- 이젠아카데미 협약기업(프로젝트 같이 진행한 기업 포함) 및 기업 구인 내용을 확인하여
- 실전 면접 준비 및 면접 진행
-
- 기계 설계 역량과 인성을 잘 어필할 수 있도록 1:1 멘토링 진행
- 예상 질문과 예상치 못한 질문에서 대처하는 방법을 익히도록 1:1 모의 면접 진행
- 모의 면접 후 전문가의 피드백을 통해 개선점 파악 후 면접까지 진행
-
커리어 페스타 진행
-
면접자가
좋아하는
이력서와 프로젝트에 대해
알게 되었어요!
메타팩토리 부트캠프 수강생,
전O준님 -
현직 설계 엔지니어에게
직접 들으니
너무 많은 도움이
됐어요!
메타팩토리 부트캠프 수강생,
이O혜님
카티아 설계 관련 취업 최신 동향,
채용과정의 주의할 점, 성공적인 취업 전략등의
커리어 페스타가 진행 됩니다.
당신도 미래산업을 대비하는
융합형 직무를 가진 인재가 될 수 있습니다!
교육비 자기부담금 0원
하지만,
매달 받는 훈련장려금으로 →
교육비 자기부담금은 0원
(40만원) ↓ 교육비 자기부담금 0원
K-디지털 국비지원 + 훈련장려금 적용
최대 20만원 지급
(6개월 기준 최대 120만원) ※ 개인별 지급액은 상이할 수 있습니다.
-
50+
협력기업
취업연계 -
희망 기업 맞춤
예상 질문 &
모의 면접 -
A Tool
사용 혜택
제공 -
500만원 상당
AI+ 실무 활용
온라인 강의 -
온라인
학습 시스템
제공 (LMS) -
교육과정
관련
교재 제공
10초 안내받기
수강 정보를 놓치지 마세요.
취업컨설팅부터 커리어코칭까지 빠르게 안내해 드립니다.
서로의 평가와 피드백에 자극 받으며,
커뮤니티안에서 더~욱 성장하는게 느껴집니다. 메타팩토리 부트캠프, 강O명님